This ELC Activity is planed for first year under graduate Computer Engineering students. The two phases of which is successfully completed. The complete details can be found here.
DAY- 1
| S.No. | Time (in hours) | Task | Description |
|---|---|---|---|
|
1. |
0830 – 0915 hrs |
Introductory Session |
Brief description of the challenges of the project. |
|
2. |
0915 – 1000 hrs |
Issue hardware |
Robotic arm kits and other required hardware will be issued to the students. |
|
3. |
1000 – 1230 hrs |
Assemble the arm components |
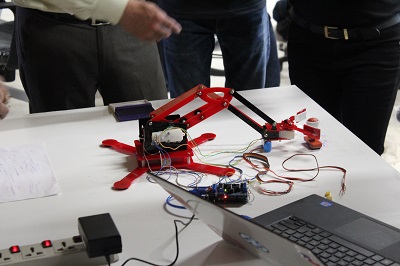
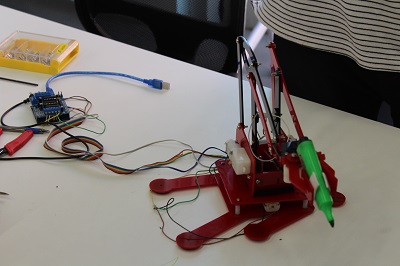
Assemble all the components of the robotic arm which includes a base, sticks, h bridge (shield or breadboard), Arduino, creative hands (form of paper/cardboard), 8 core rainbow wire strips, 9v battery. |
|
1230 – 1330 hrs |
LUNCH BREAK |
||
|
4. |
1330 – 1415 hrs |
Soldering |
Making required wired Connection through 8 core rainbow wire strips should be performed with the help of soldering. |
|
5. |
1415 – 1500 hrs |
2-D and 3-D Moments |
Perform the 2D and 3D (up, down and rotation) movements of the arm without Arduino. |
|
6. |
1500 – 1730 hrs |
Practical Exposure to Arduino |
To study the introduction to Arduino and implement basic programs such as Clockwise/Anticlockwise motion of motor with the help of Arduino. |
DAY-2
| S.No. | Time (in hours) | Task | Description |
|---|---|---|---|
|
1. |
0830 – 1000 hrs |
Connecting Arduino with Robotic arm |
Perform the 2D and 3D (up, down and rotation) anticlockwise and clockwise movements of the arm with Arduino. |
|
2. |
1000 – 1230 hrs |
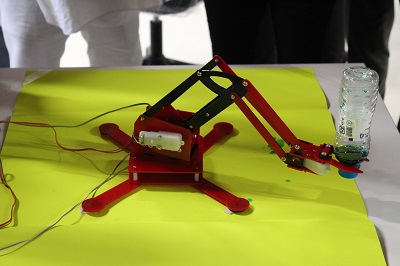
Bronze Challenge |
To pick an object from source and drop at right angle from the source location. |
|
1230 – 1330 hrs |
LUNCH BREAK |
||
|
3. |
1330 hrs onwards |
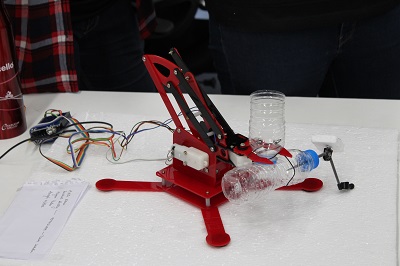
Silver Challenge |
Students are given with 3 locations A, B, and C (location can be chosen by the student randomly). Firstly, Object is to picked from Location A and has to be drop at location B. Secondly, pick the object from location C and place it on the object which has been previously placed at location B. |
|
4. |
|
Gold Challenge |
Open Ended Applications of Robotic Arms: a. Robotic Handwriting b. Cleaning Floor c. Blood Extraction d. Painting Robot e. Anything as per student’s innovation Note: 1. Students need to bring the material according to the practical application he/she want to perform. For eg. Painting brush in case of designing Painting Robot. Pen, holding clump for pen and paper in case of Robotic Handwriting. 2. In Gold challenge, student can perform any practical application of robotic arm. The aforementioned applications are just few examples. |
|
5. |
1700 – 1730 hrs |
Evaluation and Prize distribution ceremony |
Project Evaluation will be done on the basis of student’s idea, creativity, innovation and approach. 1st, 2nd, and 3rd Prize will be awarded to the teams on the basis of their performance. |
Phase 1: 7 to 8 teams out of 30 teams have reached Gold Challenge followed by Silver and Bronze challenges. Teams have proposed wonderful innovative ideas like morse code, sprinkler, sweeping floor, robot painting, robotic stamping, robotic game etc.











Phase 2: 17 teams have reached Gold Challenge out of 30 teams. Students came up with several novel ideas such as Braille Script, Robotic Lid tightener, Robotic Quiz System, Robotic IPL Umpire, Magnetic Separator, Tower of Hanoi, Robotic Autonomous Fan, Games like Ring the Bell, Bang the target, Emoji Constructor, Garbage Collector, Robotic IC Soldering, Wood Collector and Cutter.








Venue: LT101, Learning Center.
Date: 30th – 31st March 30, 2019
This ELC Activity is planed for third year under graduate Computer Engineering students. Click here for the details .